HW3 <<
Previous Next >> 期末考試
Final Project
在這學期學到了Solidworks和Solvespace這兩套繪圖軟體,Solidworks在畫圖及零件組合方面已經可以自由運用了,只是Solvespace在零件組合的部分還不太清楚如何操作。雖然花了很多時間在Solvespace的建模上,但還是慢慢摸索它的使用方法。在這學期的課程遇到最多瓶頸的是在Coppeliasim這個軟體,在組合模擬的過程內常常會把開啟實體和開啟模擬搞混,後來有去詢問比較厲害的同學,所以在考試的部分也相對比較好處理一點。
Solidworks畫圖過程:
Solvespace畫圖過程:
在這堂課學到的Coppeliasim是目前最難的東西,把STL檔案轉入都沒有什麼問題,只是在Coppeliasim的模擬組合過程有遇到許多問題,像是UI的設定要修改許多地方才能順利運動
第一軸模擬:
第二 三軸模擬:
W16考試內容 2022/01/06
(第一題)
畫圖過程:
轉入Coppeliasim過程:
在Coppeliasim中組合模擬過程:
Coppeliasim的UI介面控制操作:
(第二題)
在Coppeliasim中組合模擬過程:
Coppeliasim的UI介面控制操作:
W17考試內容 2022/01/13
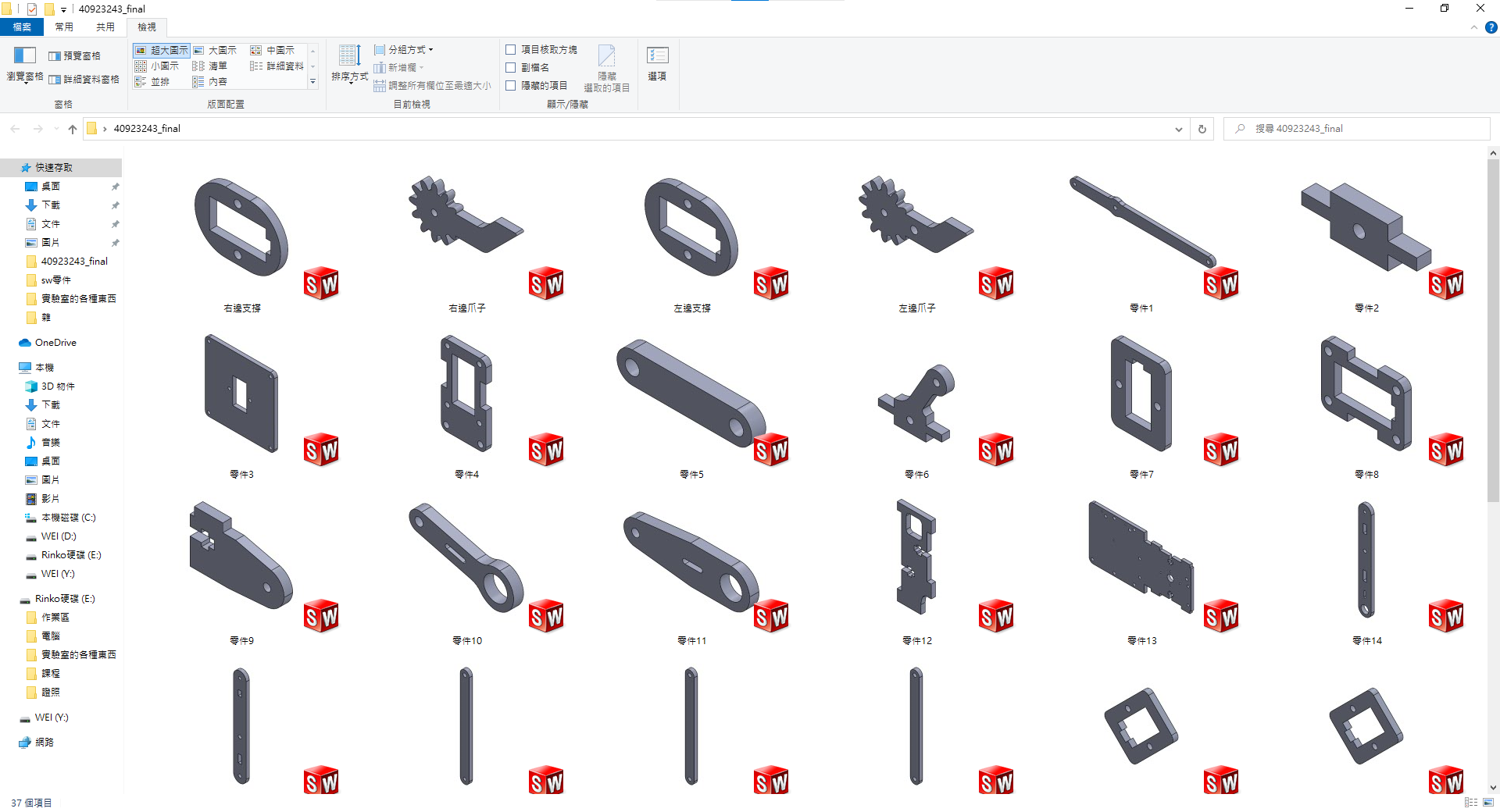
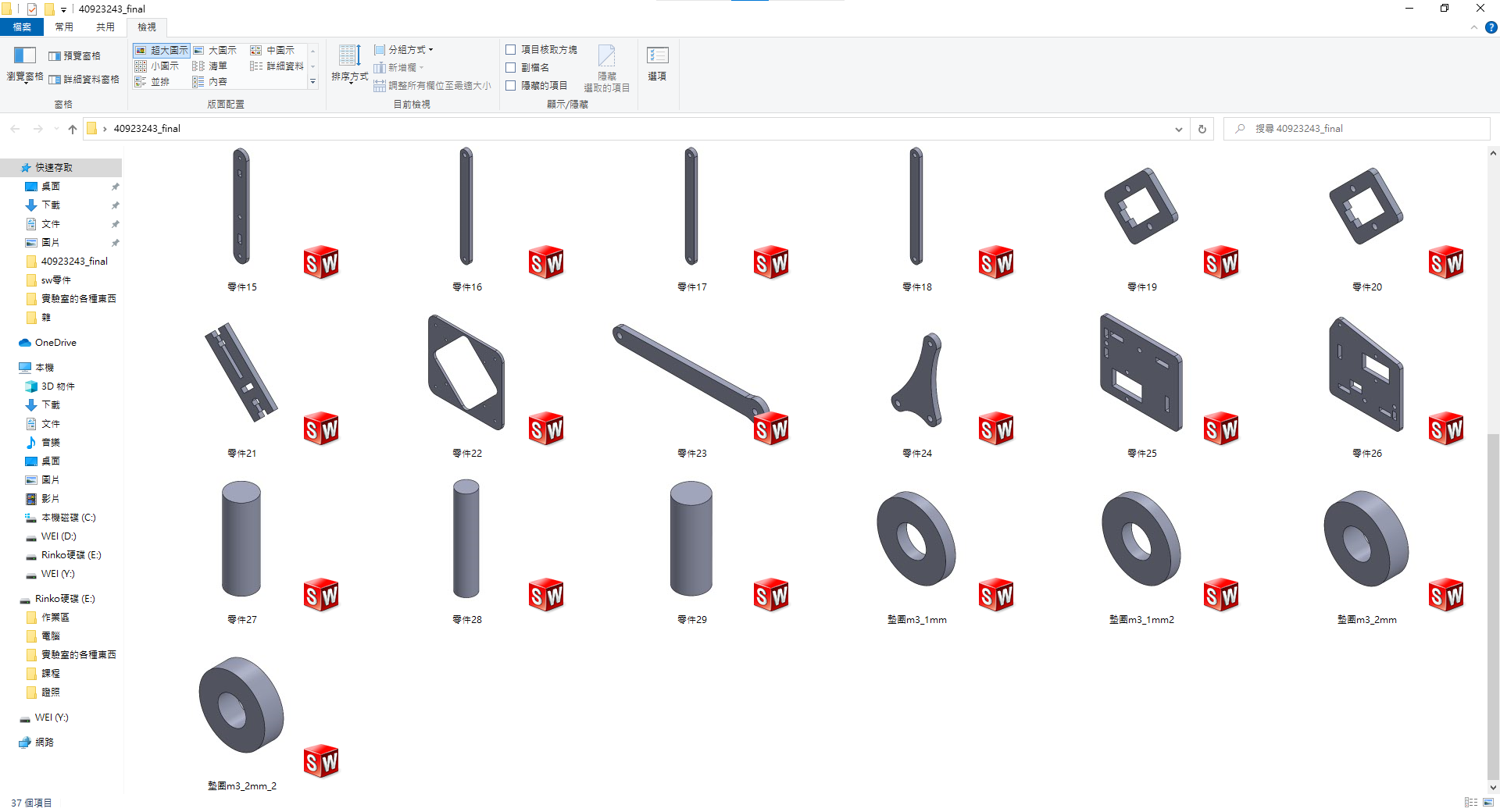
第一階段: 請將自己所完成繪製的 meArm Robot 零件與組立檔案畫面呈現在網頁中, 並將所有零件與組立檔案壓縮成"學號_final.zip" 送到個人的 @gm 帳號 GDrive, 並將連結轉為公開下載。
所有零件:
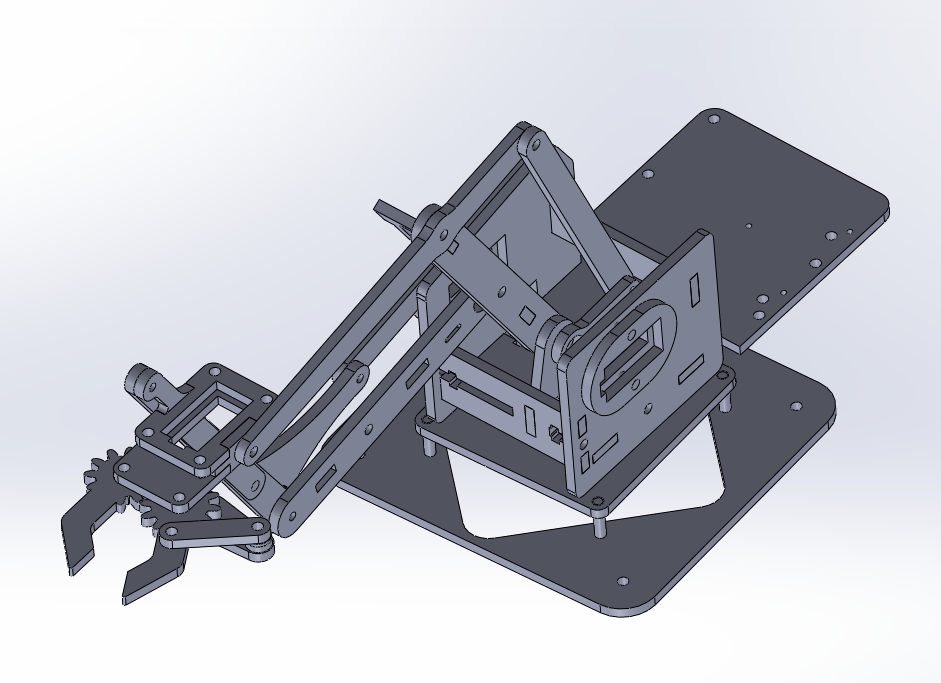
組立完成:
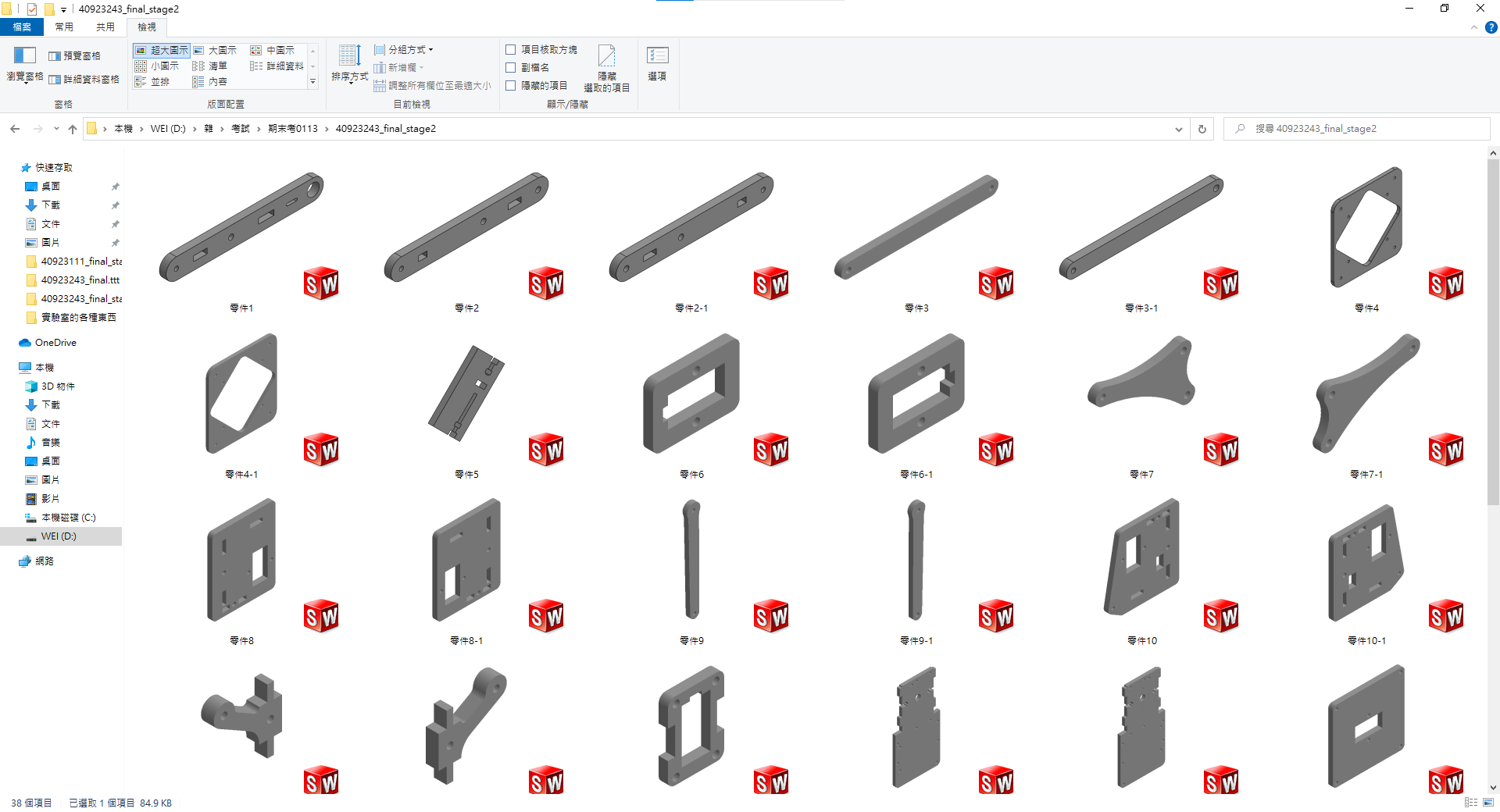
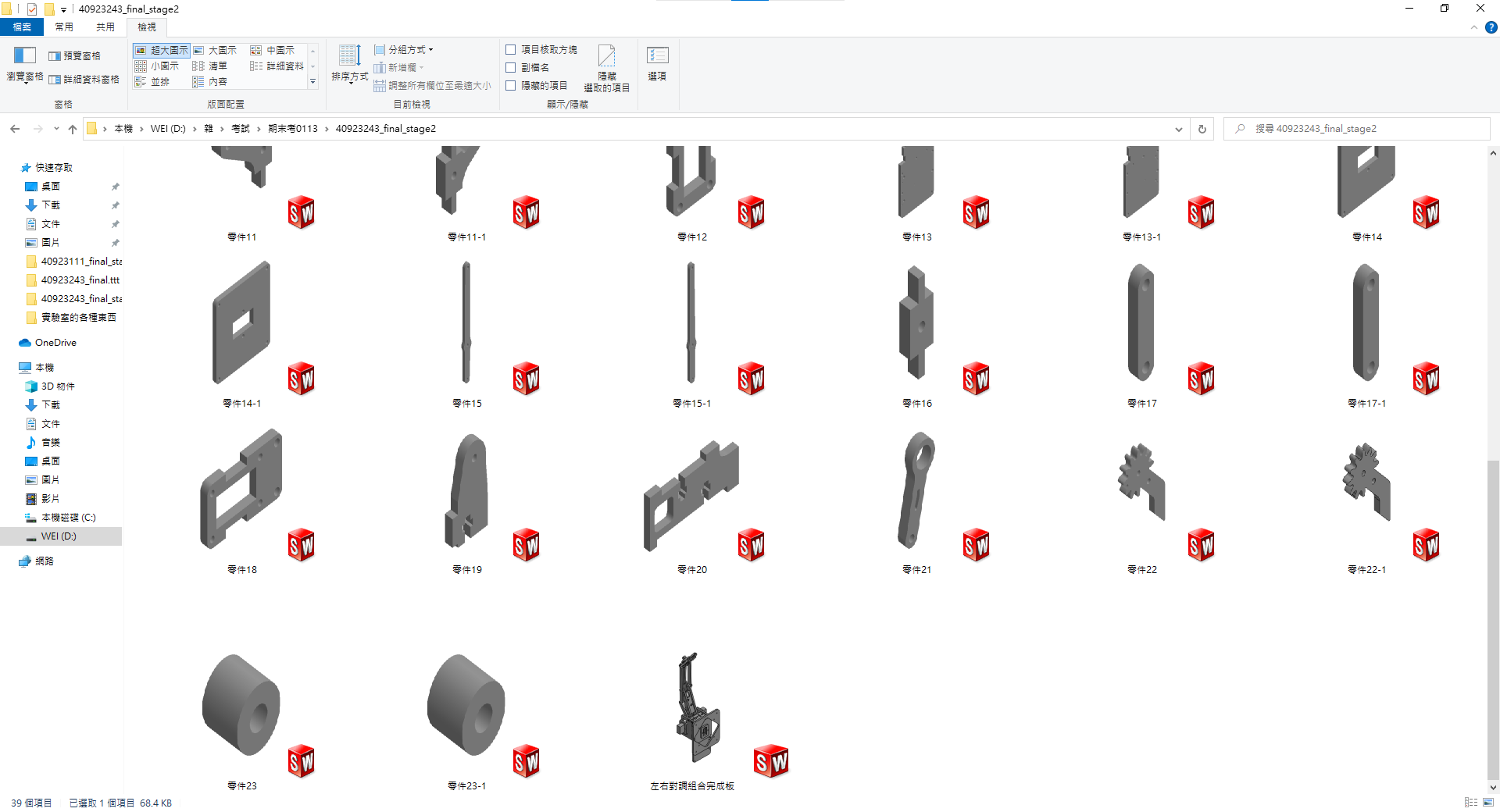
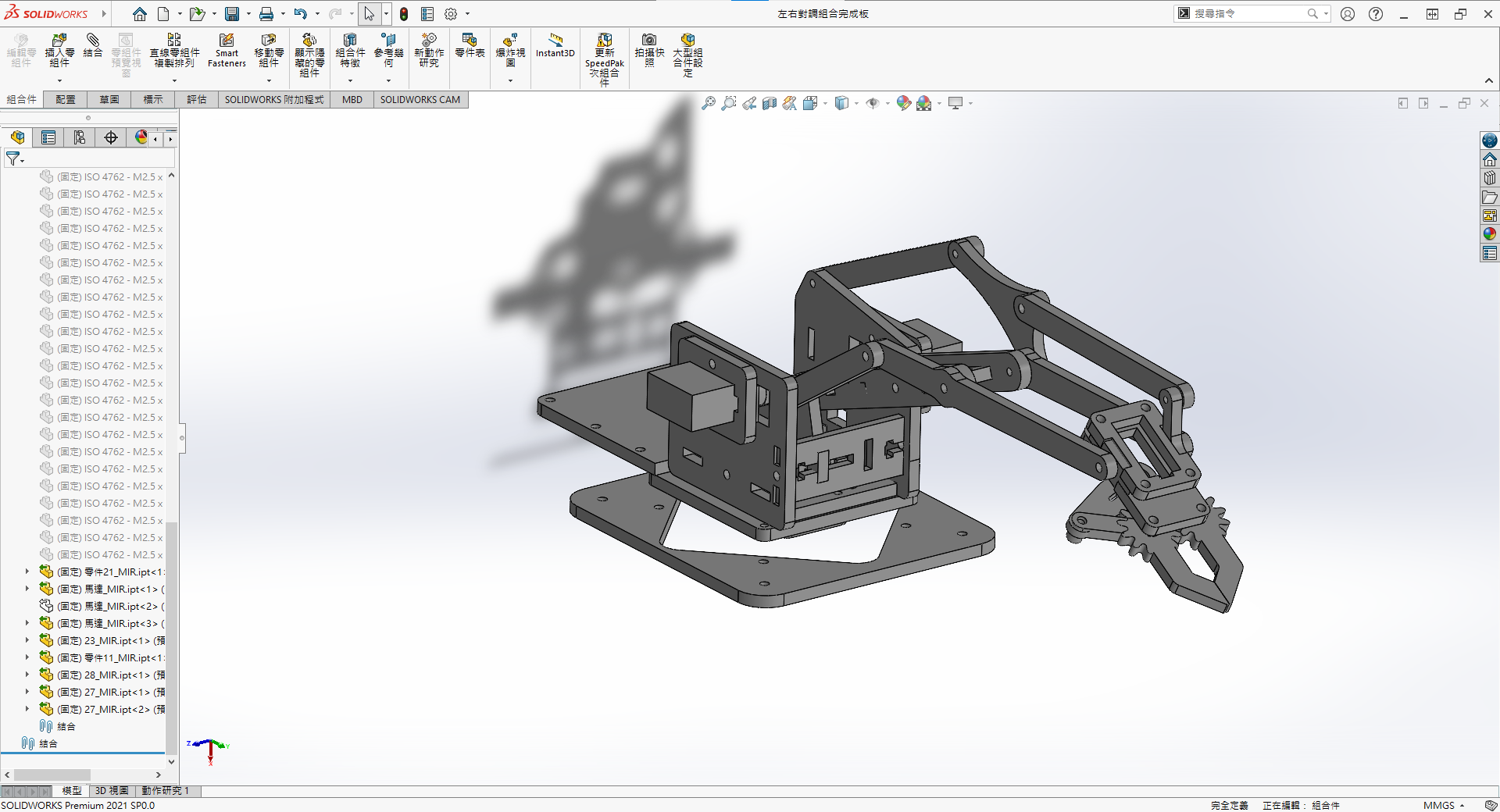
第二階段: 請修改第一階段個人所完成的 meArm 組立檔案, 將兩側連桿機構互換, 亦即將帶有三角形連桿的機構與另一方機構互相對調. 完成後, 請在網頁中呈現所完成的組立圖畫面, 並將零組件檔案壓縮成"學號_final_stage2.zip" 送到個人的 @gm 帳號 GDrive, 並將連結轉為公開下載。
所有零件:
連趕對調組立完成:
第三階段: 請將第二階段新完成的 meArm 零組件轉入 CoppeliaSim 後, 利用 Slider 控制其中的各轉動軸, 完成後請以 Wink 影片呈現製作過程, 並將"學號_final.ttt" 檔案壓縮為"學號_final_ttt.zip" 送到個人的 @gm 帳號 GDrive, 並將連結轉為公開下載。
各軸轉動過程影片:
本期末考試學習心得:
這次考試的題目和之前的作業截然不同,在Coppeliasim裡面組合模擬時有遇到許多問題,例如對於用dummy去特定零件和軸的固定功能的功能還不太熟悉,在經過同學詳細的幫助下也已經知道怎麼如何正確操作各種功能了,在這學期學到了Solidworks和Solvespace這兩套繪圖軟體,只是Solvespace在零件組合的部分還不太清楚如何操作。雖然花了很多時間在Solvespace的建模上,但還是慢慢摸索它的使用方法。在這學期的課程遇到最多瓶頸的是在Coppeliasim這個軟體,在組合模擬的過程內常常會把開啟實體和開啟模擬搞混,後來有去詢問比較厲害的同學,所以在考試的部分也相對比較好處理一點。謝謝老師以及協助我的同學!
下載專區:
01/06 考試檔案
(第一題)
Solidworks零件圖檔下載(SPD檔): 全部零件
Coppeliasim組合零件下載(有UI版):組合件
(第二題)
Coppeliasim組合零件下載(有UI版):組合件
01/13 考試檔案
meArm Robot 零件與組立檔案下載:GOOGLE雲端下載
meArm連桿對調零件與組立檔案下載:GOOGLE雲端下載
CoppeliaSim組合模擬檔案:GOOGLE雲端下載
HW3 <<
Previous Next >> 期末考試